







- シンクタンクならニッセイ基礎研究所 >
- 不動産 >
- CRE(企業不動産戦略) >
- 自動運転の社会実装に向けて(前編)-前橋市・群馬大学の取組事例からのインプリケーションを中心に
2022年03月30日
自動運転の社会実装に向けて(前編)-前橋市・群馬大学の取組事例からのインプリケーションを中心に


文字サイズ
- 小
- 中
- 大
1――はじめに
前橋市は、我が国の自治体の中で、自動運転バスの社会実装に向けていち早く取り組んできたが、筆者は、その取組みのキーパーソンである、群馬大学大学院理工学府准教授・同大学次世代モビリティ社会実装研究センター(CRANTS:Center for Research on Adoption of NextGen Transportation Systems)副センター長の小木津武樹氏、前橋市未来創造部参事兼交通政策課長の細谷精一氏の両氏と2021年8月18日に対談する機会を得た。対談の内容については、「ジェロントロジー対談:自動運転は地域課題を解決するか~群馬大学のオープンイノベーションの現場から」と題した弊社発行レターにて3回に分けて詳細に報告した1。
この対談から、自動運転システムを社会実装・実用化していくための考え方や課題について、多くの示唆が得られた。そこで本稿と次稿の2編にわたり、対談から得られたインプリケーションを中心に、筆者のこれまでの研究を踏まえた上で、自動運転の社会実装の在り方について改めて詳細に考察することとしたい。まず、前編の本稿では、自動運転の社会実装について議論する上で、最もベーシックな論点となるテクノロジーおよび走行領域設定の視点を中心に考察したい。
なお、ここでは、自動運転システムを実装する対象としては、オーナーカー(自家用車)というより、主としてサービスカー(バスやタクシーなど移動サービス向け車両)を想定して議論を進めることとする。
1 坊美生子、百嶋徹「ジェロントロジー対談:自動運転は地域課題を解決するか~群馬大学のオープンイノベーションの現場から」(上)ニッセイ基礎研究所『100Gerontology:Mobility』2021年11月9日、同(中)2021年11月18日、同(下)2021年12月8日を参照されたい。
この対談から、自動運転システムを社会実装・実用化していくための考え方や課題について、多くの示唆が得られた。そこで本稿と次稿の2編にわたり、対談から得られたインプリケーションを中心に、筆者のこれまでの研究を踏まえた上で、自動運転の社会実装の在り方について改めて詳細に考察することとしたい。まず、前編の本稿では、自動運転の社会実装について議論する上で、最もベーシックな論点となるテクノロジーおよび走行領域設定の視点を中心に考察したい。
なお、ここでは、自動運転システムを実装する対象としては、オーナーカー(自家用車)というより、主としてサービスカー(バスやタクシーなど移動サービス向け車両)を想定して議論を進めることとする。
1 坊美生子、百嶋徹「ジェロントロジー対談:自動運転は地域課題を解決するか~群馬大学のオープンイノベーションの現場から」(上)ニッセイ基礎研究所『100Gerontology:Mobility』2021年11月9日、同(中)2021年11月18日、同(下)2021年12月8日を参照されたい。
2――対談で議論した主要な項目
対談で議論した主要な項目は、以下の通りである。いずれも自動運転の社会実装の在り方を考える上で欠かせないポイントとなる。前編の本稿では、主として(1)および(2)をカバーし、(3)~(6)については後編にて言及したい。
(1) 自動運転システムの導入に適した道路環境(ODD)や気象などの条件は何か
(2) 自動運転システムにAIをどこまで活用することが妥当か
(3) 自動運転と街づくりをどのように連携させるか。新規開発したスマートシティの方が導入に適しているか
(4) 自動運転の研究開発と社会実装に必要な産学官連携の在り方とは
(5) 自動運転サービスの収益性を上げるために何が必要か
(6) 自動運転は高齢者の移動支援につながるか
(1) 自動運転システムの導入に適した道路環境(ODD)や気象などの条件は何か
(2) 自動運転システムにAIをどこまで活用することが妥当か
(3) 自動運転と街づくりをどのように連携させるか。新規開発したスマートシティの方が導入に適しているか
(4) 自動運転の研究開発と社会実装に必要な産学官連携の在り方とは
(5) 自動運転サービスの収益性を上げるために何が必要か
(6) 自動運転は高齢者の移動支援につながるか
3――自動運転の社会実装の在り方に関わる考察
本章では、第2章に記載した項目のうち(1)および(2)を中心に、自動運転の社会実装の在り方について詳細に考察することとする。
1|テクノロジーの視点──国の技術ポートフォリオとして「枯れた技術」と「最先端技術」を併せ持つ重要性
(1) 前橋市の自動運転バスには制御判断機能としてのAIは搭載されていない
自動運転システムには「AI(人工知能)がコアテクノロジーとして搭載されている」と考えがちだが、前橋市での実証実験(2018年度以降、直近の2021年度まで毎年度実施)に使用されてきた自動運転シャトルバス(JR前橋駅から上毛電鉄中央前橋駅までの約1kmの区間)には、画像認識や車両制御の判断・命令などの中核的な機能としてAIは搭載されていない2。
ディープラーニング(深層学習)で学習したAIモデルの場合、AIが判断した経緯や根拠を使う側の人間が理解できないという「ブラックボックス」の問題がある。小木津氏は、対談の中で「自動運転にAIを全く使わないという訳ではなく、使い方を限定させている」と前置きした上で、自動運転バスにAIを搭載していない理由については、「AIにはブラックボックスがあるという問題はもちろんあるが、そもそも判断を自動でできるようにするということが、いま一番注力すべき点だとは、あまり思っていない。そこは人とコラボレーションできる部分であるから、ある程度、遠隔にいる人がオペレーションでカバーできる部分もある」と述べた。
2 自動運転バスには脳としての機能を担うAIは搭載されていないが、2020年度の自動運転バスの実証実験においては、「(※群馬大学次世代モビリティ社会実装研究センター内の)試験路に設置したカメラ映像とAI処理装置で他車両との衝突を予測し、バスへ停止指示を出すという実験を行った。ローカル5G、AI、エッジコンピューティングを組み合わせた技術である」「路側インフラにローカル5Gアンテナとセンシングデバイスを搭載して車両と連携するという仕組みは、NECが開発した技術だ」という(日本電気株式会社(NEC)ホームページ2021年7月15日「自動運転バスで、誰もが暮らしやすい街へ 5Gを活用した前橋市の挑戦」から引用。ただし(※ )は筆者による注記)。続く2021年度の実証実験においては、「NECのAIベースの映像配信技術と映像分析に基づくアラート通知技術により、1名のオペレーターによる複数台の自動運転バスの効率的な監視を可能にする遠隔監視システムの検証も行う」という(ICTまちづくり共通プラットフォーム推進機構・群馬大学・日本モビリティ・NECプレスリリース2022年2月14日「群馬県前橋市でローカル5Gを活用した複数台遠隔監視による自動運転バスの公道実証を実施」から引用)。また、前橋市の郊外部で運行するオンデマンド交通では、AI配車システムが用いられている。
(1) 前橋市の自動運転バスには制御判断機能としてのAIは搭載されていない
自動運転システムには「AI(人工知能)がコアテクノロジーとして搭載されている」と考えがちだが、前橋市での実証実験(2018年度以降、直近の2021年度まで毎年度実施)に使用されてきた自動運転シャトルバス(JR前橋駅から上毛電鉄中央前橋駅までの約1kmの区間)には、画像認識や車両制御の判断・命令などの中核的な機能としてAIは搭載されていない2。
ディープラーニング(深層学習)で学習したAIモデルの場合、AIが判断した経緯や根拠を使う側の人間が理解できないという「ブラックボックス」の問題がある。小木津氏は、対談の中で「自動運転にAIを全く使わないという訳ではなく、使い方を限定させている」と前置きした上で、自動運転バスにAIを搭載していない理由については、「AIにはブラックボックスがあるという問題はもちろんあるが、そもそも判断を自動でできるようにするということが、いま一番注力すべき点だとは、あまり思っていない。そこは人とコラボレーションできる部分であるから、ある程度、遠隔にいる人がオペレーションでカバーできる部分もある」と述べた。
2 自動運転バスには脳としての機能を担うAIは搭載されていないが、2020年度の自動運転バスの実証実験においては、「(※群馬大学次世代モビリティ社会実装研究センター内の)試験路に設置したカメラ映像とAI処理装置で他車両との衝突を予測し、バスへ停止指示を出すという実験を行った。ローカル5G、AI、エッジコンピューティングを組み合わせた技術である」「路側インフラにローカル5Gアンテナとセンシングデバイスを搭載して車両と連携するという仕組みは、NECが開発した技術だ」という(日本電気株式会社(NEC)ホームページ2021年7月15日「自動運転バスで、誰もが暮らしやすい街へ 5Gを活用した前橋市の挑戦」から引用。ただし(※ )は筆者による注記)。続く2021年度の実証実験においては、「NECのAIベースの映像配信技術と映像分析に基づくアラート通知技術により、1名のオペレーターによる複数台の自動運転バスの効率的な監視を可能にする遠隔監視システムの検証も行う」という(ICTまちづくり共通プラットフォーム推進機構・群馬大学・日本モビリティ・NECプレスリリース2022年2月14日「群馬県前橋市でローカル5Gを活用した複数台遠隔監視による自動運転バスの公道実証を実施」から引用)。また、前橋市の郊外部で運行するオンデマンド交通では、AI配車システムが用いられている。
(2) 想定外の事象に臨機応変に対応できない現在のAIは限定領域で大きな成果をもたらす
そもそもAIは、ディープラーニングの過程で学んでいない想定外の偶発的事象に対して、臨機応変に対応することができない3。従って、複数のタスクをこなせない現在のAI(=特化型AI)4は、想定外の事象が無限に起こり得る複雑な現実世界では、その力を発揮できなくなる可能性が高まってしまう一方、閉じた限定的シーンで特定のタスクを明確なルールに基づいて実行させると、非常に大きな成果をもたらす。
AIの開発・実装においては、AIに関わる科学者・開発者や経営者など人間が、特化型AIの性能を最大限に引き出すべく、AIが解くべき問題およびAIを利活用する環境・領域をしっかりと設定することこそが最も重要である、と言っても過言ではない5。現状のAIの実力・強味や限界を十分に理解した上で、AIを上手に使いこなす工夫を凝らし、社会課題解決のツールとして利活用することが重要なのだ。
実際、人間が設定した限定された閉じた環境下で、AI やロボットの社会実装・実用化が進展している。例えば、チェス・将棋・囲碁の専用AI、検索サービスやECサイトでユーザーの検索や購買の履歴傾向などを分析してユーザーに合った検索結果の導出や商品の推奨を行うレコメンドエンジン、家庭用ロボット掃除機、スマートフォンの音声アシスタント機能用AI、スマートスピーカー(AIスピーカー)、工場の生産ラインにおける組立作業用AI搭載ロボット、工場の製品品質検査工程における製品の外観(欠陥)検査用AI、電子材料など機能性材料の設計・開発工程においてビッグデータやAIの活用を取り入れた最適な材料設計のための新たな方法論であるマテリアルズ・インフォマティクス(MI:Materials Informatics)6、オフィス入館用顔認証型AIサーマルカメラシステム、オフィス内の警備やフロア清掃を自動で行うAI搭載ロボット、小売店舗における来店者の属性・行動を分析するAIカメラ、大型物流センターにおける自動搬送用AI搭載ロボット、防犯・監視・入出国管理などに用いる顔認証AI システム、医療画像診断支援用AI、などが挙げられる。
このように現在のAIは、閉じた環境さえ与えられれば、ボードゲームから生活、製造業(研究開発・生産・品質検査)、オフィス等不動産管理、小売業、物流業、セキュリティ、医療などに至るまで、幅広い多様な分野で大活躍しており、社会のための不可欠な存在となっている。
3 百嶋徹「AI・IoTの利活用の在り方」ニッセイ基礎研究所『基礎研レポート』2019年3月29日、同「AI・IoTの利活用の在り方」『ニッセイ基礎研所報』2019年Vol.63(2019年6月)にて指摘。
4 現在実用化されているAIは、特定のタスクしかこなせない「特化型AI」である一方、人間のように多様なタスクをこなせる「汎用AI(AGI:Artificial General Intelligence)」は、現在のテクノロジーの延長では実現しない、とされる。特化型AIは「弱いAI」、AGIは「強いAI」とも呼ばれる。本稿では、現在のAIである特化型を前提として議論を進めることとする。
5 百嶋徹「自動運転とAIのフレーム問題」ニッセイ基礎研究所『基礎研レポート』2019年11月18日にて指摘。
6 MIを活用した研究開発DXに関わる考察については、百嶋徹「AIと研究開発DX」ニッセイ基礎研究所『研究員の眼』2020年12月28日、同「AIと研究開発DX」『ニッセイ基礎研REPORT』2021年2月号を参照されたい。
そもそもAIは、ディープラーニングの過程で学んでいない想定外の偶発的事象に対して、臨機応変に対応することができない3。従って、複数のタスクをこなせない現在のAI(=特化型AI)4は、想定外の事象が無限に起こり得る複雑な現実世界では、その力を発揮できなくなる可能性が高まってしまう一方、閉じた限定的シーンで特定のタスクを明確なルールに基づいて実行させると、非常に大きな成果をもたらす。
AIの開発・実装においては、AIに関わる科学者・開発者や経営者など人間が、特化型AIの性能を最大限に引き出すべく、AIが解くべき問題およびAIを利活用する環境・領域をしっかりと設定することこそが最も重要である、と言っても過言ではない5。現状のAIの実力・強味や限界を十分に理解した上で、AIを上手に使いこなす工夫を凝らし、社会課題解決のツールとして利活用することが重要なのだ。
実際、人間が設定した限定された閉じた環境下で、AI やロボットの社会実装・実用化が進展している。例えば、チェス・将棋・囲碁の専用AI、検索サービスやECサイトでユーザーの検索や購買の履歴傾向などを分析してユーザーに合った検索結果の導出や商品の推奨を行うレコメンドエンジン、家庭用ロボット掃除機、スマートフォンの音声アシスタント機能用AI、スマートスピーカー(AIスピーカー)、工場の生産ラインにおける組立作業用AI搭載ロボット、工場の製品品質検査工程における製品の外観(欠陥)検査用AI、電子材料など機能性材料の設計・開発工程においてビッグデータやAIの活用を取り入れた最適な材料設計のための新たな方法論であるマテリアルズ・インフォマティクス(MI:Materials Informatics)6、オフィス入館用顔認証型AIサーマルカメラシステム、オフィス内の警備やフロア清掃を自動で行うAI搭載ロボット、小売店舗における来店者の属性・行動を分析するAIカメラ、大型物流センターにおける自動搬送用AI搭載ロボット、防犯・監視・入出国管理などに用いる顔認証AI システム、医療画像診断支援用AI、などが挙げられる。
このように現在のAIは、閉じた環境さえ与えられれば、ボードゲームから生活、製造業(研究開発・生産・品質検査)、オフィス等不動産管理、小売業、物流業、セキュリティ、医療などに至るまで、幅広い多様な分野で大活躍しており、社会のための不可欠な存在となっている。
3 百嶋徹「AI・IoTの利活用の在り方」ニッセイ基礎研究所『基礎研レポート』2019年3月29日、同「AI・IoTの利活用の在り方」『ニッセイ基礎研所報』2019年Vol.63(2019年6月)にて指摘。
4 現在実用化されているAIは、特定のタスクしかこなせない「特化型AI」である一方、人間のように多様なタスクをこなせる「汎用AI(AGI:Artificial General Intelligence)」は、現在のテクノロジーの延長では実現しない、とされる。特化型AIは「弱いAI」、AGIは「強いAI」とも呼ばれる。本稿では、現在のAIである特化型を前提として議論を進めることとする。
5 百嶋徹「自動運転とAIのフレーム問題」ニッセイ基礎研究所『基礎研レポート』2019年11月18日にて指摘。
6 MIを活用した研究開発DXに関わる考察については、百嶋徹「AIと研究開発DX」ニッセイ基礎研究所『研究員の眼』2020年12月28日、同「AIと研究開発DX」『ニッセイ基礎研REPORT』2021年2月号を参照されたい。
(3) AIを搭載した自動運転システムも限定領域での実用化を先行させることが定石
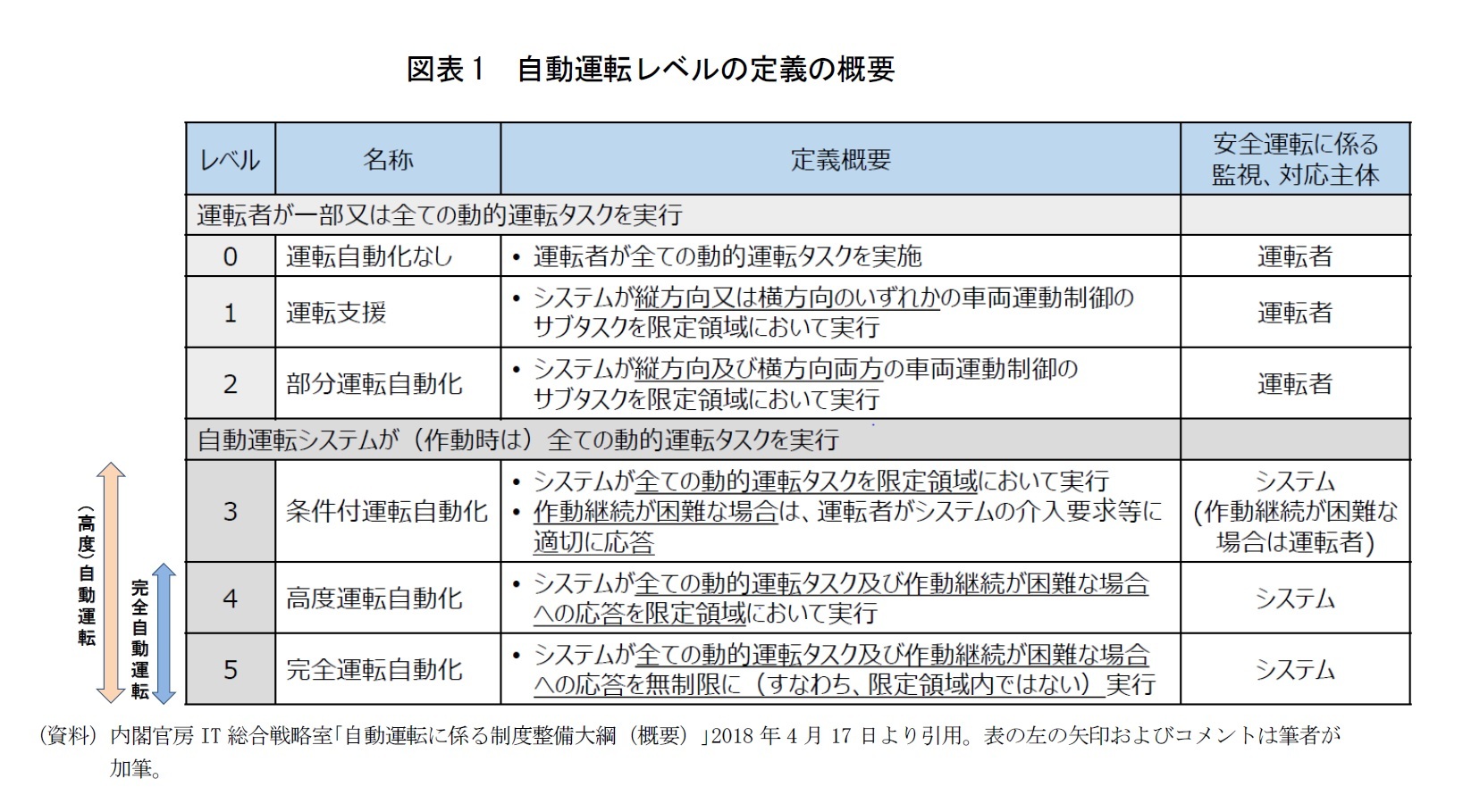
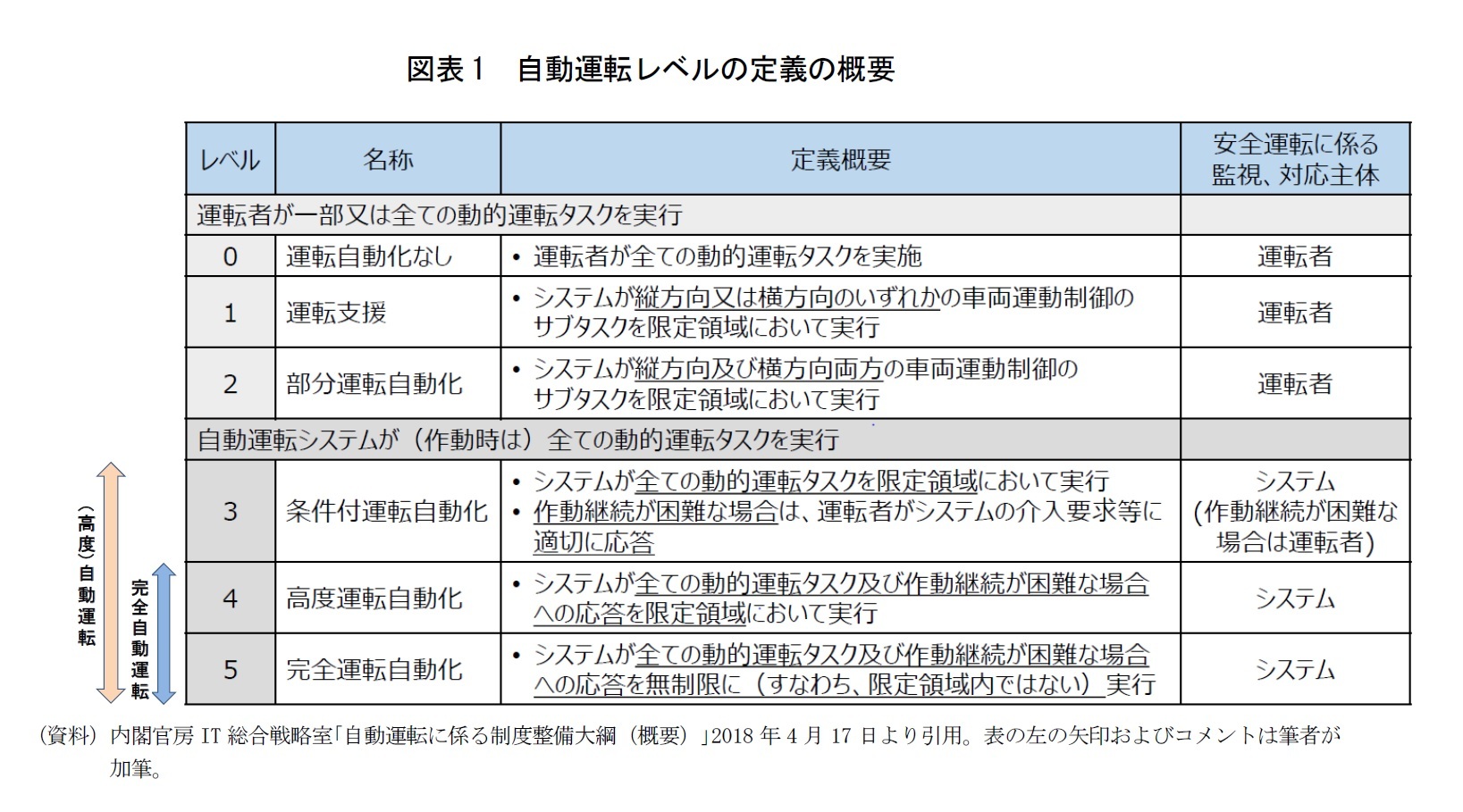
その意味では、基本的に現実社会の複雑な環境下で用いられる自動運転システムへのAIの搭載・実用化は技術的難易度が極めて高く、とりわけ運転自動化レベルの最上位に位置付けられる、限定条件なしでシステムがすべての運転タスクを行う「レベル5」は、「AIの社会実装における最大のチャレンジ」7である、と言っても過言ではない(図表1)。
自動運転システムにAIを搭載する場合も、前述したように、究極の自動運転であるレベル5への到達をいきなり目指すのではなく、ルールが明確で想定外の事象が起こりにくいようデザインされた、閉じた環境での実用化を先行させることが定石である、と言えよう。すなわち、いわゆる「運行設計領域」(ODD: Operational Design Domain)の限られた時空間での実用化をまずは先行させることが求められる。
その意味では、基本的に現実社会の複雑な環境下で用いられる自動運転システムへのAIの搭載・実用化は技術的難易度が極めて高く、とりわけ運転自動化レベルの最上位に位置付けられる、限定条件なしでシステムがすべての運転タスクを行う「レベル5」は、「AIの社会実装における最大のチャレンジ」7である、と言っても過言ではない(図表1)。
自動運転システムにAIを搭載する場合も、前述したように、究極の自動運転であるレベル5への到達をいきなり目指すのではなく、ルールが明確で想定外の事象が起こりにくいようデザインされた、閉じた環境での実用化を先行させることが定石である、と言えよう。すなわち、いわゆる「運行設計領域」(ODD: Operational Design Domain)の限られた時空間での実用化をまずは先行させることが求められる。
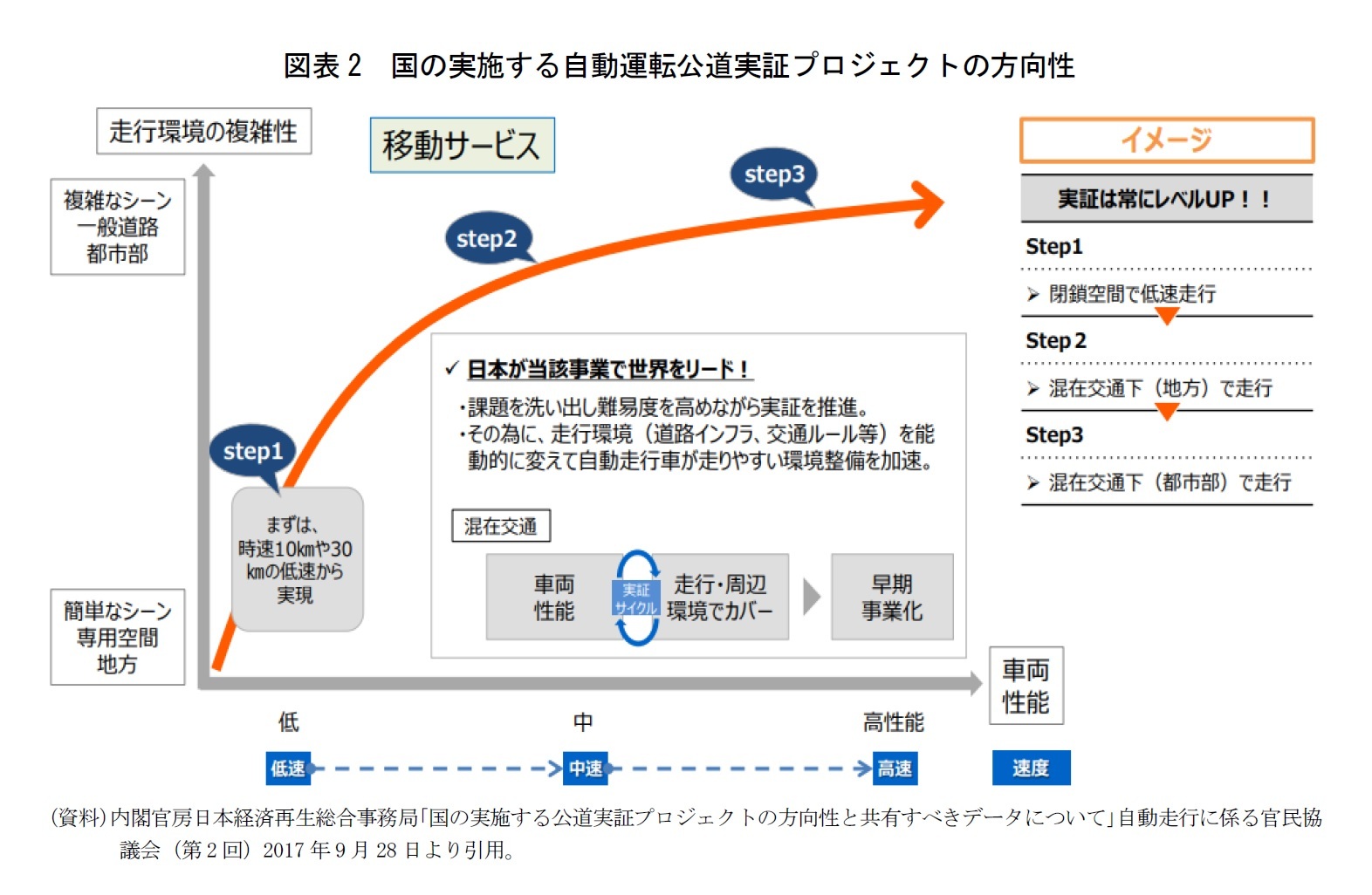
実際日本政府は、移動サービスの公道実証プロジェクトの推進において、自動走行実現に向けた基本的なアプローチとして、「社会課題の解決に向けたニーズの高い場所で、適切に安全を確保しながら、社会受容性を高め、簡単なシーン(専用空間、地方)から複雑なシーン(一般道路、都市部)へ活用を拡大」8していくことを想定してきた。さらに、この走行環境の複雑性の軸(図表2の縦軸)に、低速・中速・高速(高性能)で表した車両性能の軸(図表2の横軸)を加えた2軸でプロジェクトの難易度を示し、イメージとしては、Step1が「閉鎖空間で低速走行」、Step2が「(他の交通参加者との)混在交通下で地方にて中速走行」、Step3が「混在交通下で都市部にて高速走行」を表し、Stepが上がるごとに難易度が高まり、実証事業のレベルアップが図られることを想定してきた。

因みにオーナーカーの領域では、本田技研工業が、2020年11月に世界初のレベル3(限定条件下でシステムがすべての運転操作を行うが、緊急時などシステムからの運転操作の委譲要請(テイクオーバーリクエスト)があれば人間が操作を引き継ぐ必要がある「条件付き自動運転」の段階、図表1)の型式指定を国土交通省より取得し、このレベル3の自動運行装置「トラフィックジャムパイロット(渋滞運転機能)」を含む同社最新の安全運転支援システム「Honda SENSING Elite」を搭載した、高級セダン「レジェンド」を21年3月に発売した。このように世界初のレベル3の量産車が日本メーカーから登場することとなったが、高速道路での渋滞時において車線内の走行を維持しながら前方の車を追従することに加え、強い雨・降雪・濃霧などの悪天候でないこと、車速(時速)が自動運転システムの作動開始前は約30キロ未満・作動開始後は約50キロ以下であることなど、一定の走行環境条件が付されている9。
7 注5と同様。
8 経済産業省製造産業局「自動運転を巡る経済産業省の取組」2018年2月16日より引用。
9 国土交通省自動車局「世界初!自動運転車(レベル3)の型式指定を行いました」2020年11月11日を基に記述した。
7 注5と同様。
8 経済産業省製造産業局「自動運転を巡る経済産業省の取組」2018年2月16日より引用。
9 国土交通省自動車局「世界初!自動運転車(レベル3)の型式指定を行いました」2020年11月11日を基に記述した。
(4) 限定された走行環境の下でも想定外の事象は起こり得る
しかし、限定されたODDの下であっても、前橋市で実証実験が実施されてきた自動運転シャトルバスの事例のように、専用道ではなく一般公道を走行する限りは、想定外の偶発的事象は起こり得る。
例えば、前橋市での自動運転バスの実証実験の経路は、(1)JR前橋駅と上毛電鉄中央前橋駅を結ぶ2点間輸送を目的とする路線であり、途中にバス停が存在しないこと、(2)運行距離が1kmと短距離であること、(3)右左折が最小限であること、(4)信号を含む交差点が5か所と少ないこと、(5)経路上の2か所に歩道橋が整備されており歩行者との交差が避けられること、(6)前橋駅と国道50号の間はバス専用レーンがあること10、などから、街中の一般道ではあるが比較的単純な走行環境であると言えよう。
それでも細谷氏は、20年度までの3か年の実証実験で得られた課題として、「今後いかに違法駐車車両対策をし、自動運転車両が走行しやすい環境を確保できるか」「実証実験を行ったエリアは、前橋のシンボリックなストリートなので、ケヤキ並木が生い茂っており、GPSが入りにくいという問題があった。そこをいかに他の設備で補完するか」「上毛電鉄中央前橋駅前の複雑な交差点に進入する際に、対向車両や歩行者、自転車へのセンシング技術を向上し、いかに遅延なく感知するか」といった点を我々との対談で挙げた。
実は限定されたODDの下でも想定外の事象が起こり得る事例は、枚挙にいとまがない。例えば、スイス有数のワインの産地であるヴァレー州シオン市の旧市街では、2016年から自動運転シャトルバスが試験走行しているが、「通りの鉄柵から垂れ下がっていた植物の枝や葉が風で揺れると障害物だと認識し、バスはプログラムに従って減速または完全停止する」11という。
10 細谷精一、飯塚弘一(2019)「都市部基幹バスの自動運転導入に伴う環境基盤整備と交通課題解決」アーバンインフラ・テクノロジー推進会議より引用。
11 ビッグイシュー・オンライン2018年10月22日「自動運転車の実用化に向けた技術的・倫理的・社会的課題とは」より引用。このシャトルバスには、「安全パイロット」と呼ばれるスタッフが同乗してあらゆる状況を監視し、必要に応じて介入するのだという。従って、定義上はレベル3に分類されるとみられる。
しかし、限定されたODDの下であっても、前橋市で実証実験が実施されてきた自動運転シャトルバスの事例のように、専用道ではなく一般公道を走行する限りは、想定外の偶発的事象は起こり得る。
例えば、前橋市での自動運転バスの実証実験の経路は、(1)JR前橋駅と上毛電鉄中央前橋駅を結ぶ2点間輸送を目的とする路線であり、途中にバス停が存在しないこと、(2)運行距離が1kmと短距離であること、(3)右左折が最小限であること、(4)信号を含む交差点が5か所と少ないこと、(5)経路上の2か所に歩道橋が整備されており歩行者との交差が避けられること、(6)前橋駅と国道50号の間はバス専用レーンがあること10、などから、街中の一般道ではあるが比較的単純な走行環境であると言えよう。
それでも細谷氏は、20年度までの3か年の実証実験で得られた課題として、「今後いかに違法駐車車両対策をし、自動運転車両が走行しやすい環境を確保できるか」「実証実験を行ったエリアは、前橋のシンボリックなストリートなので、ケヤキ並木が生い茂っており、GPSが入りにくいという問題があった。そこをいかに他の設備で補完するか」「上毛電鉄中央前橋駅前の複雑な交差点に進入する際に、対向車両や歩行者、自転車へのセンシング技術を向上し、いかに遅延なく感知するか」といった点を我々との対談で挙げた。
実は限定されたODDの下でも想定外の事象が起こり得る事例は、枚挙にいとまがない。例えば、スイス有数のワインの産地であるヴァレー州シオン市の旧市街では、2016年から自動運転シャトルバスが試験走行しているが、「通りの鉄柵から垂れ下がっていた植物の枝や葉が風で揺れると障害物だと認識し、バスはプログラムに従って減速または完全停止する」11という。
10 細谷精一、飯塚弘一(2019)「都市部基幹バスの自動運転導入に伴う環境基盤整備と交通課題解決」アーバンインフラ・テクノロジー推進会議より引用。
11 ビッグイシュー・オンライン2018年10月22日「自動運転車の実用化に向けた技術的・倫理的・社会的課題とは」より引用。このシャトルバスには、「安全パイロット」と呼ばれるスタッフが同乗してあらゆる状況を監視し、必要に応じて介入するのだという。従って、定義上はレベル3に分類されるとみられる。
(5) 限定領域での想定外の事象にも柔軟に対応し得る遠隔型自動運転システム
このように限定されたODDの下でも、自動運転システムが臨機応変に対応できない想定外の偶発的事象が起こり得るため、「人は柔軟に思考できる点と、責任を持って判断ができる点が非常に大きな特徴なので、そこを活かさない手はないと思っている。(※自動運転の)専用道ではなく公道を走行する限りは、基本的に人の介入をゼロにする(※AI主導の)レベル4(※限定領域でシステムがすべての運転タスクを行う段階、図表1)への到達を優先するよりも、人がちょっと介在する構造で仕組みを作っていった方が、使いやすいものになるのではないか」12との小木津氏の考え方は極めて理にかなっている。
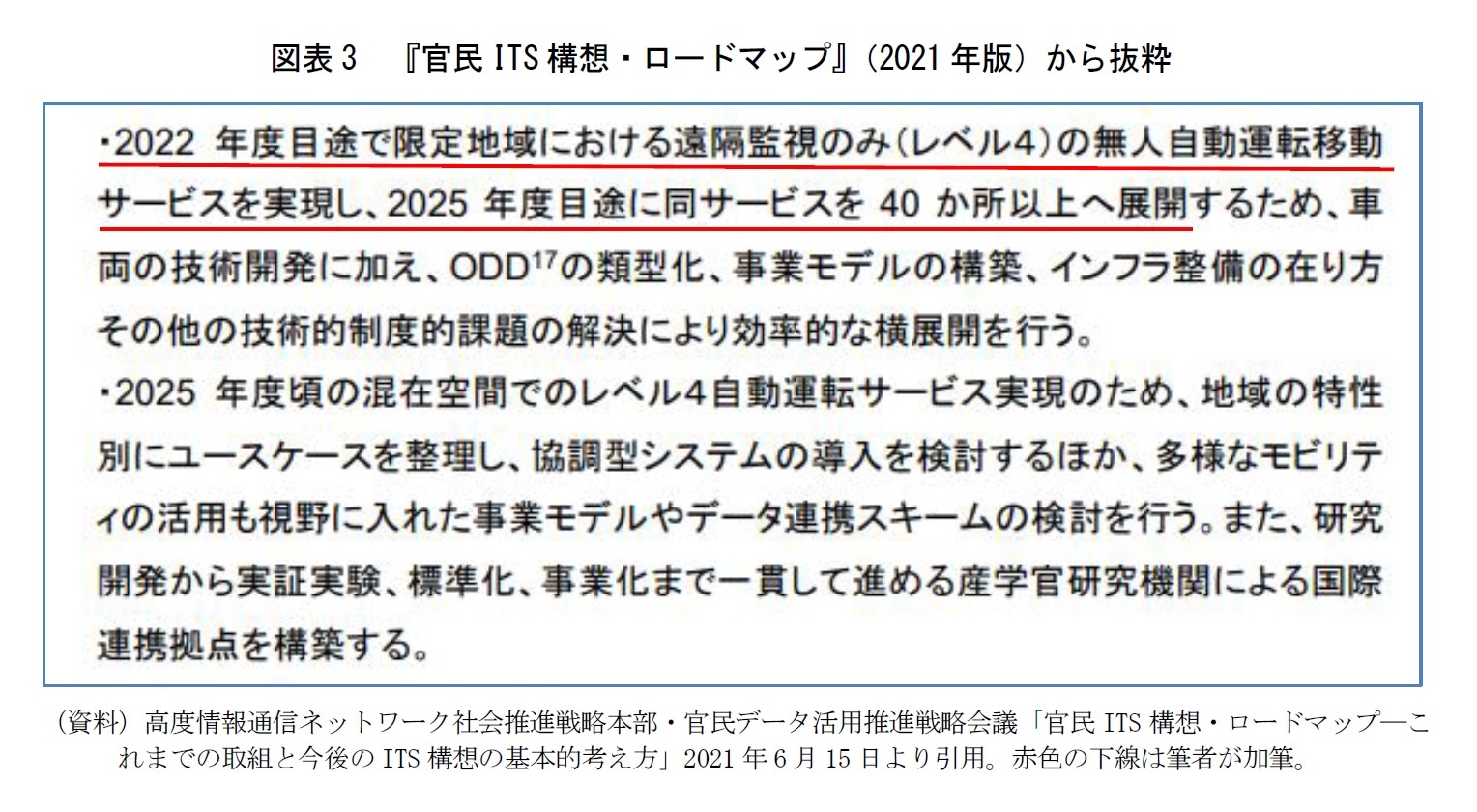
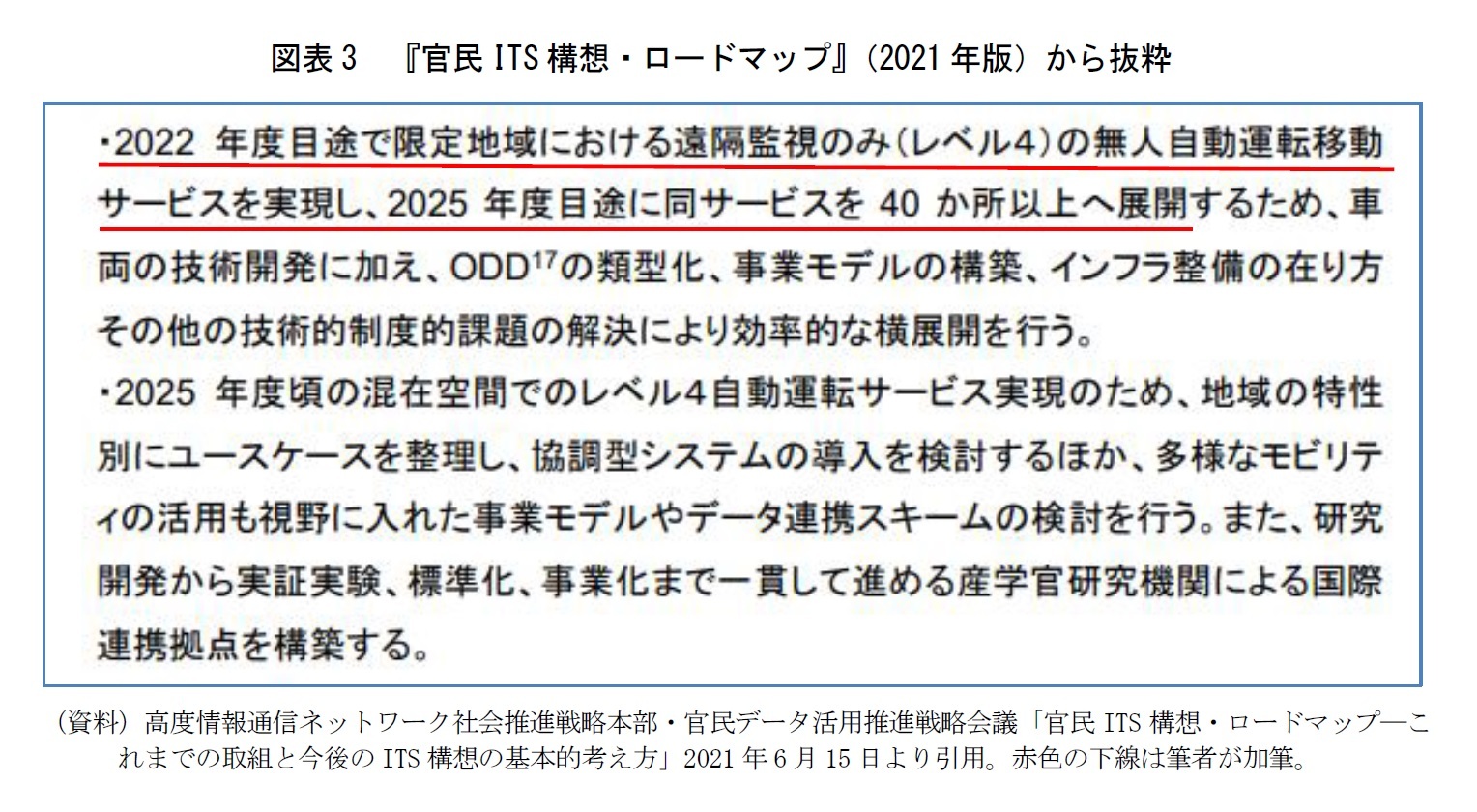
日本政府の高度情報通信ネットワーク社会推進戦略本部(IT 総合戦略本部、本部長・内閣総理大臣)が毎年発表する「官民ITS 構想・ロードマップ」の最新の2021年版においても、2022年度目途で限定地域における遠隔監視のみ(レベル4)の無人自動運転移動サービスを実現し、2025年度目途に同サービスを40か所以上へ展開することを目指すことが謳われており、移動サービスの分野では、必ずしもAIによる判断の自動化に頼らない遠隔型自動運転の普及が強調されている(図表3)。遠隔型の自動運転移動サービスを推進するとの政府方針を受けて、前橋市以外でも、主として自治体主導でAIを搭載しない遠隔監視型の自動運転システムによるサービスカーの実証実験(主としてレベル2)が数多く実施されている。小木津氏も、これまで日本全国で60を超える地域でサービスカーの自動運転の実証実験を実施してきたという。
このように限定されたODDの下でも、自動運転システムが臨機応変に対応できない想定外の偶発的事象が起こり得るため、「人は柔軟に思考できる点と、責任を持って判断ができる点が非常に大きな特徴なので、そこを活かさない手はないと思っている。(※自動運転の)専用道ではなく公道を走行する限りは、基本的に人の介入をゼロにする(※AI主導の)レベル4(※限定領域でシステムがすべての運転タスクを行う段階、図表1)への到達を優先するよりも、人がちょっと介在する構造で仕組みを作っていった方が、使いやすいものになるのではないか」12との小木津氏の考え方は極めて理にかなっている。
日本政府の高度情報通信ネットワーク社会推進戦略本部(IT 総合戦略本部、本部長・内閣総理大臣)が毎年発表する「官民ITS 構想・ロードマップ」の最新の2021年版においても、2022年度目途で限定地域における遠隔監視のみ(レベル4)の無人自動運転移動サービスを実現し、2025年度目途に同サービスを40か所以上へ展開することを目指すことが謳われており、移動サービスの分野では、必ずしもAIによる判断の自動化に頼らない遠隔型自動運転の普及が強調されている(図表3)。遠隔型の自動運転移動サービスを推進するとの政府方針を受けて、前橋市以外でも、主として自治体主導でAIを搭載しない遠隔監視型の自動運転システムによるサービスカーの実証実験(主としてレベル2)が数多く実施されている。小木津氏も、これまで日本全国で60を超える地域でサービスカーの自動運転の実証実験を実施してきたという。
これまで遠隔型自動運転の実証実験が行われてきた自治体の中でも、福井県永平寺町では、遠隔ドライバー1名が2台の車両(小型電動カート)を運用する世界初の公道実証(レベル2、国土交通省・経済産業省によるラストマイル型自動運転の実証実験)を2018年11月に開始し、2020年12月より1人の遠隔ドライバーが常時監視・操作する車両を3台に増やしたのに続き、車両を高度化し国内で初めて認可を受けた遠隔監視・操作型のレベル3での運行を2021年3月に開始したことで、大きな注目を集めている13。車両が道路に敷設した電磁誘導線とRFIDによる走行経路を追従し、最高時速12キロの低速で自動走行するものである。2022年度内にレベル4を目指すという。
(2022年03月30日「基礎研レポート」)
このレポートの関連カテゴリ
関連レポート
- 自動運転は地域課題を解決するか(上)~群馬大学のオープンイノベーションの現場から
- 自動運転は地域課題を解決するか(中)~群馬大学のオープンイノベーションの現場から
- 自動運転は地域課題を解決するか(下)~群馬大学のオープンイノベーションの現場から
- 過疎地において自動運転サービスは持続可能か(上)~レベル3の最前線・福井県永平寺町の取組みから~
- 過疎地において自動運転サービスは持続可能か(下)~レベル3の最前線・福井県永平寺町の取組みから~
- 製造業を支える高度部材産業の国際競争力強化に向けて(後編)-我が国の高度部材産業の今後の目指すべき方向
- AIの産業・社会利用に向けて
- AI・IoTの利活用の在り方-米メジャーリーグの「データ革命」に学ぶ
- 自動運転とAIのフレーム問題-AIの社会実装へのインプリケーション
- イチロー引退会見に学ぶAI・IoTとの向き合い方

 各種レポート配信をメールでお知らせ。読み逃しを防ぎます!
各種レポート配信をメールでお知らせ。読み逃しを防ぎます!



新着記事
-
2025年10月14日
厚生年金の加入制限が段階的に廃止へ。適用徹底には連携強化が課題。~年金改革ウォッチ 2025年10月号 -
2025年10月14日
貸出・マネタリー統計(25年9月)~銀行貸出の伸びが4年半ぶりの4%台に、定期預金等はバブル期以来の高い伸びを記録 -
2025年10月14日
中国の貿易統計(25年9月)~輸出、輸入とも加速。対米輸出は減少が続く -
2025年10月14日
ロシアの物価状況(25年9月)-低下が続くが、足もとインフレ圧力の強まりも -
2025年10月14日
今週のレポート・コラムまとめ【10/7-10/10発行分】
レポート紹介
-
研究領域
-
経済
-
金融・為替
-
資産運用・資産形成
-
年金
-
社会保障制度
-
保険
-
不動産
-
経営・ビジネス
-
暮らし
-
ジェロントロジー(高齢社会総合研究)
-
医療・介護・健康・ヘルスケア
-
政策提言
-
-
注目テーマ・キーワード
-
統計・指標・重要イベント
-
媒体
- アクセスランキング
お知らせ
-
2025年07月01日
News Release
-
2025年06月06日
News Release
-
2025年04月02日
News Release
【自動運転の社会実装に向けて(前編)-前橋市・群馬大学の取組事例からのインプリケーションを中心に】【シンクタンク】ニッセイ基礎研究所は、保険・年金・社会保障、経済・金融・不動産、暮らし・高齢社会、経営・ビジネスなどの各専門領域の研究員を抱え、様々な情報提供を行っています。
自動運転の社会実装に向けて(前編)-前橋市・群馬大学の取組事例からのインプリケーションを中心にのレポート Topへ- 新型コロナウイルス
- ウィズコロナ・アフターコロナ
- 生成AI・AI
- IoT
- デジタルトランスフォーメーション(DX)
- フィンテック(FinTech)
- キャッシュレス
- デジタル通貨
- デジタルプラットフォーム
- マイナンバー
- MaaS、CASE
- SDGs
- ESG
- 気候変動
- カーボンニュートラル・脱炭素社会
- サステナビリティ
- ウェルビーイング
- 生物多様性
- イデコ(iDeCo)
- 新NISA・NISA
- 日本銀行
- 人手不足・人材不足
- 働き方改革
- 人的資本経営
- 従業員エンゲージメント
- テレワーク・在宅勤務
- ダイバーシティ(多様性)社会
- 外国人雇用・就労
- 労働政策
- 地域包括ケア・地域共生社会
- 認知症
- 金融(ファイナンシャル)ジェロントロジー
- 全世代型社会保障
- 社会保障・税改革
- 医療・介護制度改革
- 健康寿命
- 健康経営
- 格差・貧困
- 世代間格差
- パワーカップル
- 未婚化
- プレコンセプションケア
- 少子高齢化
- 東京一極集中
- インバウンド
- シェアリングエコノミー
- Z世代・α世代
- エンタメ
- オフィスレントインデックス
- 生命保険事業概況
- 米中貿易摩擦
- 米国
- 中国
- 欧州
- アジア・新興国
- 韓国
- ASEAN
- 統計
- 確定拠出年金
- 企業型DC
- 資産所得倍増プラン
- 金融リテラシー
- 住宅リテラシー
- 年金制度改革
- インド
- 経済安全保障
- 供給網(サプライ・チェーン)
- 消費者物価指数(CPI)│日本
- 雇用統計│日本
- 鉱工業生産指数│日本
- 貿易統計│日本
- 法人企業統計│日本
- QE速報・予測
- 日銀金融政策決定会合
- 日銀短観│日本
- 資金循環統計│日本
- 景気ウォッチャー調査│日本
- 地域経済報告(さくらレポート)
- マネタリーベース│日本
- GDP等│米国
- FOMC(連邦公開市場委員会)│米国
- 住宅販売・着工│米国
- 雇用統計│米国
- 米個人所得・支出|米国
- ECB政策理事会│欧州
- ユーロ圏消費者物価指数
- ユーロ圏GDP
- ユーロ圏失業率
- 英国雇用関連統計
- 英国金融政策
- 英国GDP
- 将来人口推計
- 人口動態統計
- 宿泊旅行統計
- 中国GDP
- インドGDP
- タイGDP
- マレーシアGDP
- フィリピンGDP
- インドネシアGDP
- ベトナムGDP
- ロシアGDP
- ブラジルGDP
- IMF世界経済見通し
- 企業物価指数
- インド消費者物価
研究領域
Copyright © NLI Research Institute. All rights reserved.