







- シンクタンクならニッセイ基礎研究所 >
- 不動産 >
- 都市計画 >
- 自動運転は地域課題を解決するか(上)~群馬大学のオープンイノベーションの現場から
2021年11月09日
自動運転は地域課題を解決するか(上)~群馬大学のオープンイノベーションの現場から
このレポートの関連カテゴリ


文字サイズ
- 小
- 中
- 大
はじめに─国内における自動運転システムの研究開発や実証実験、法整備の状況
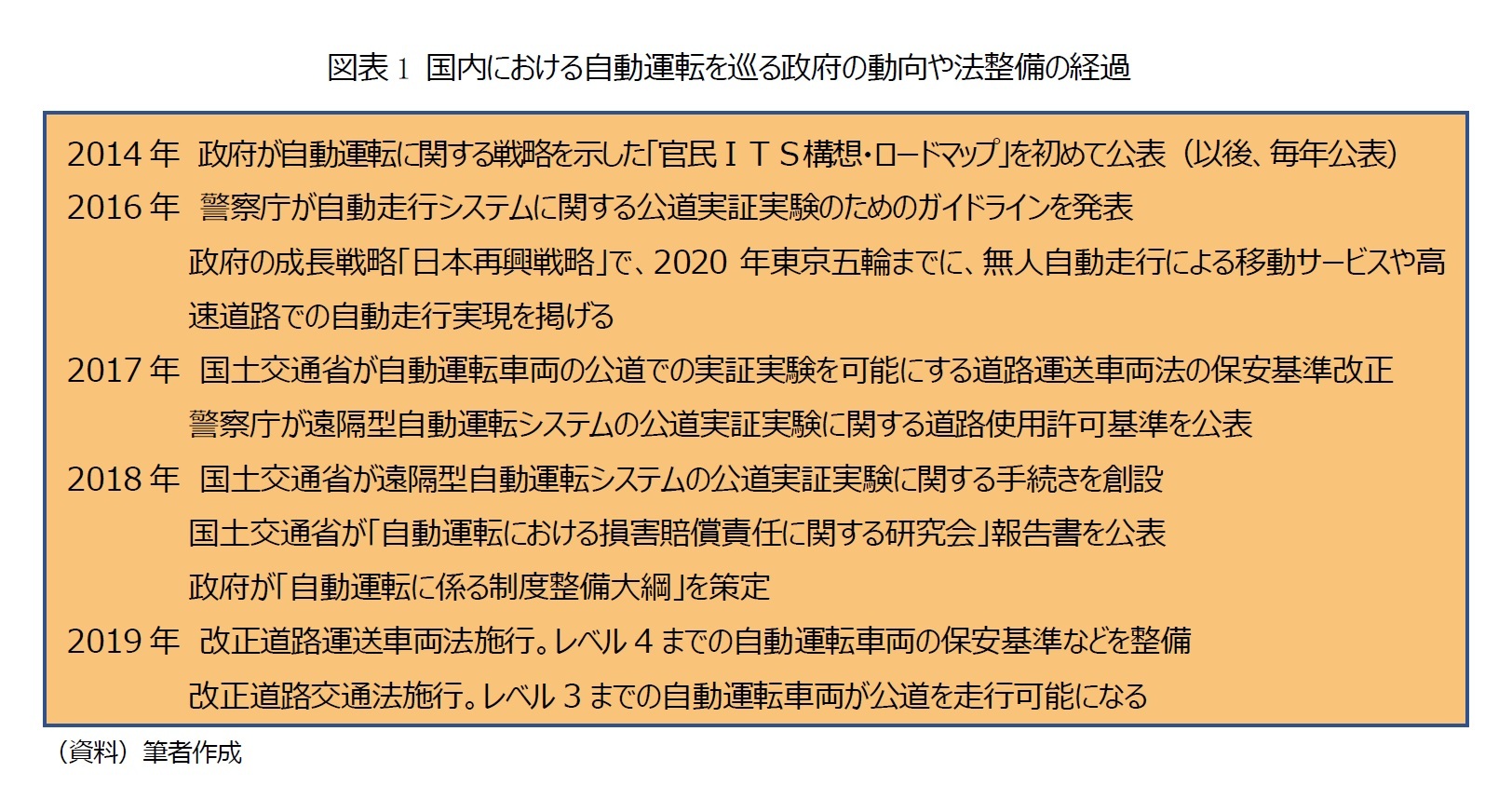
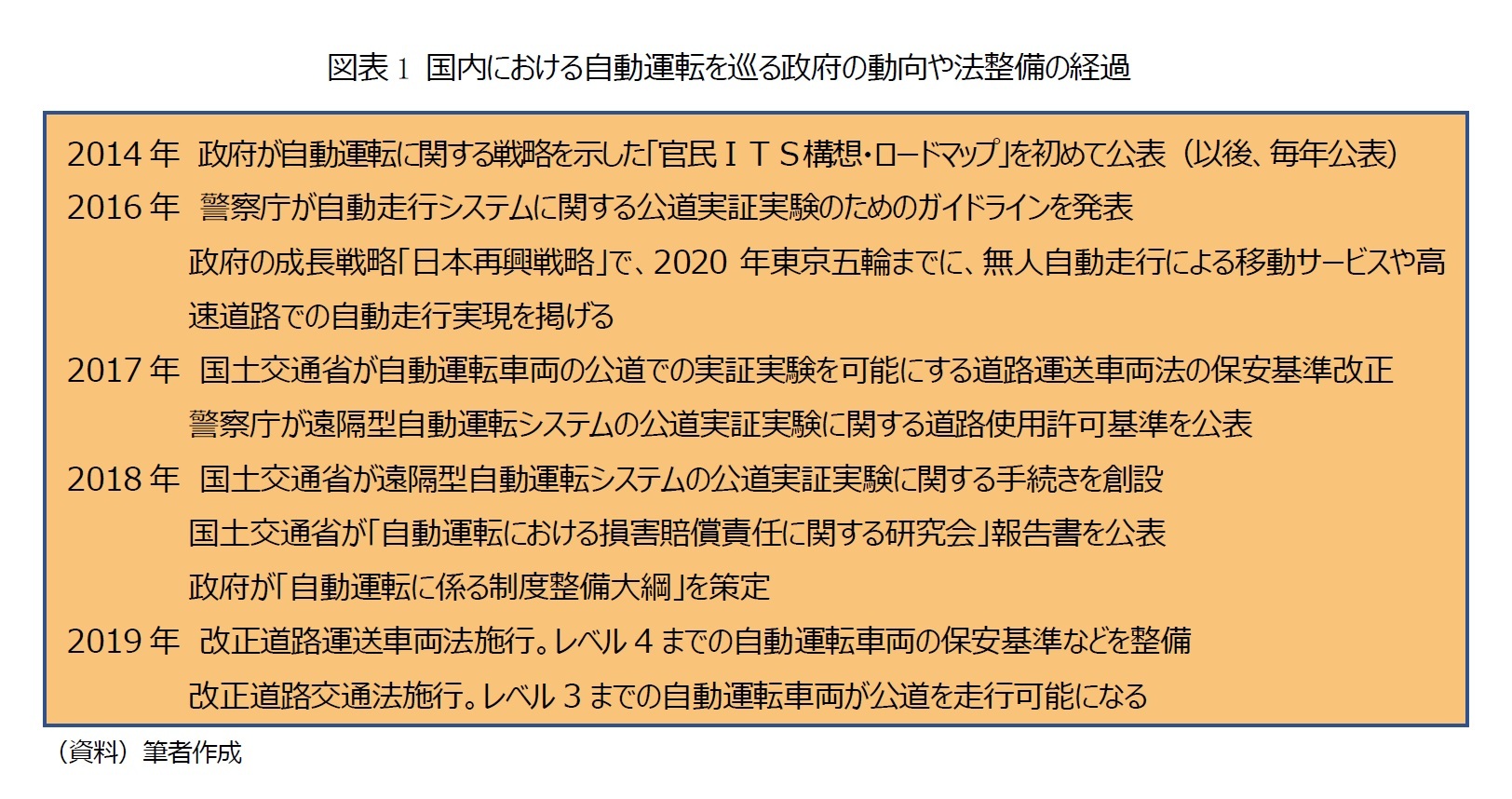
自動運転システムを巡っては、海外でも米中の巨大IT企業や大手自動車メーカー、新興企業などが研究開発とテスト走行にしのぎを削っている。国内でも、グローバル競争に乗り遅れまいと、産学官連携で研究開発が推進され、2018年には政府方針を定めた「自動運転に係る制度整備大綱」が策定されるなど、急ピッチで法整備が進められてきた(図表1)。事故発生時の責任の所在など、法的な議論も行われ、社会実装に向けた環境整備は進んでいる。
また、地域においては、高齢ドライバーによる交通事故の増加や、旅客運送・貨物運送業に就くドライバー不足、公共交通の衰退等、人とモノの移動に関する問題が深刻化している。これらの解決のために、自動運転の実用化が期待されているが、安全性や収益性などには大きな課題が残されている。
また、地域においては、高齢ドライバーによる交通事故の増加や、旅客運送・貨物運送業に就くドライバー不足、公共交通の衰退等、人とモノの移動に関する問題が深刻化している。これらの解決のために、自動運転の実用化が期待されているが、安全性や収益性などには大きな課題が残されている。
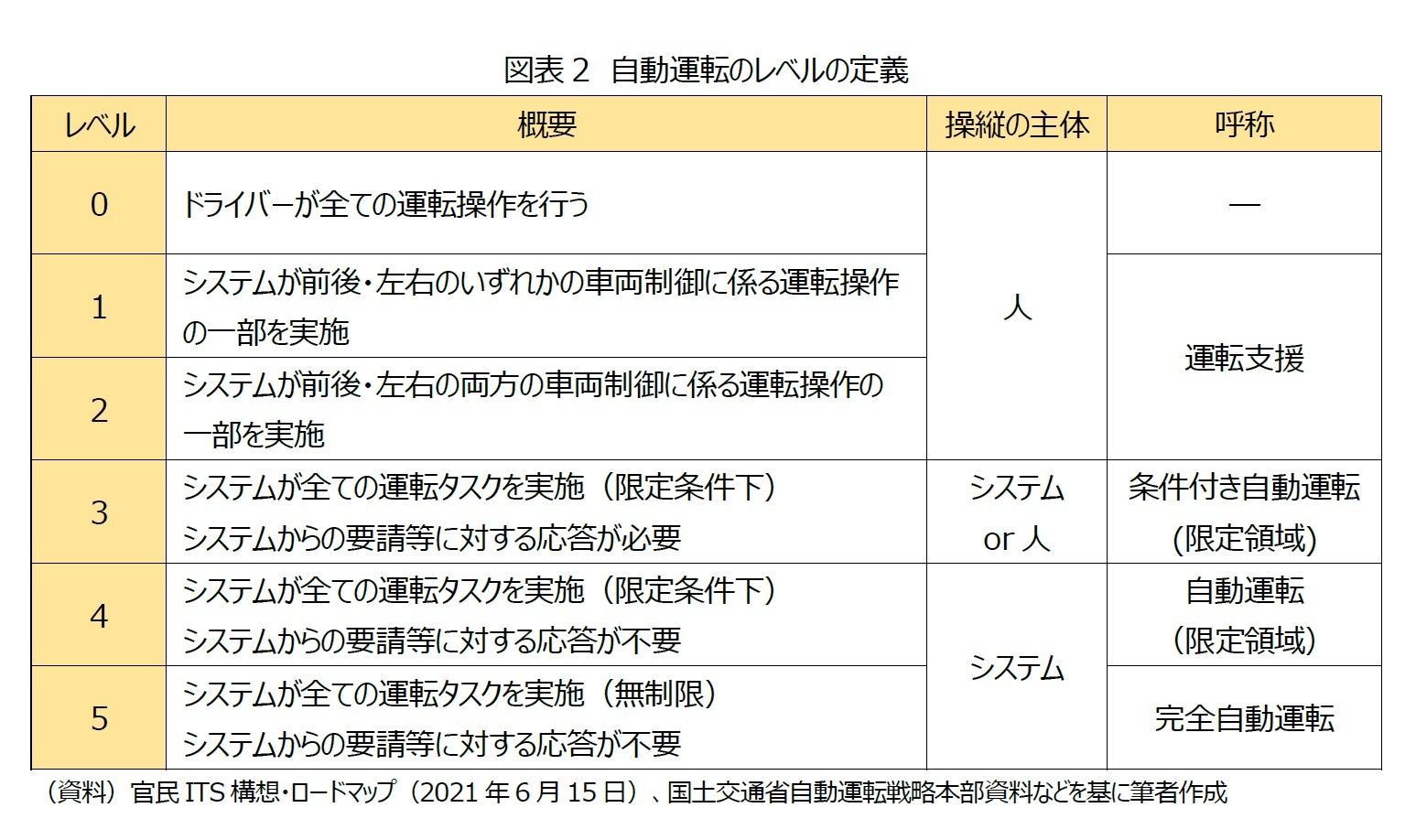
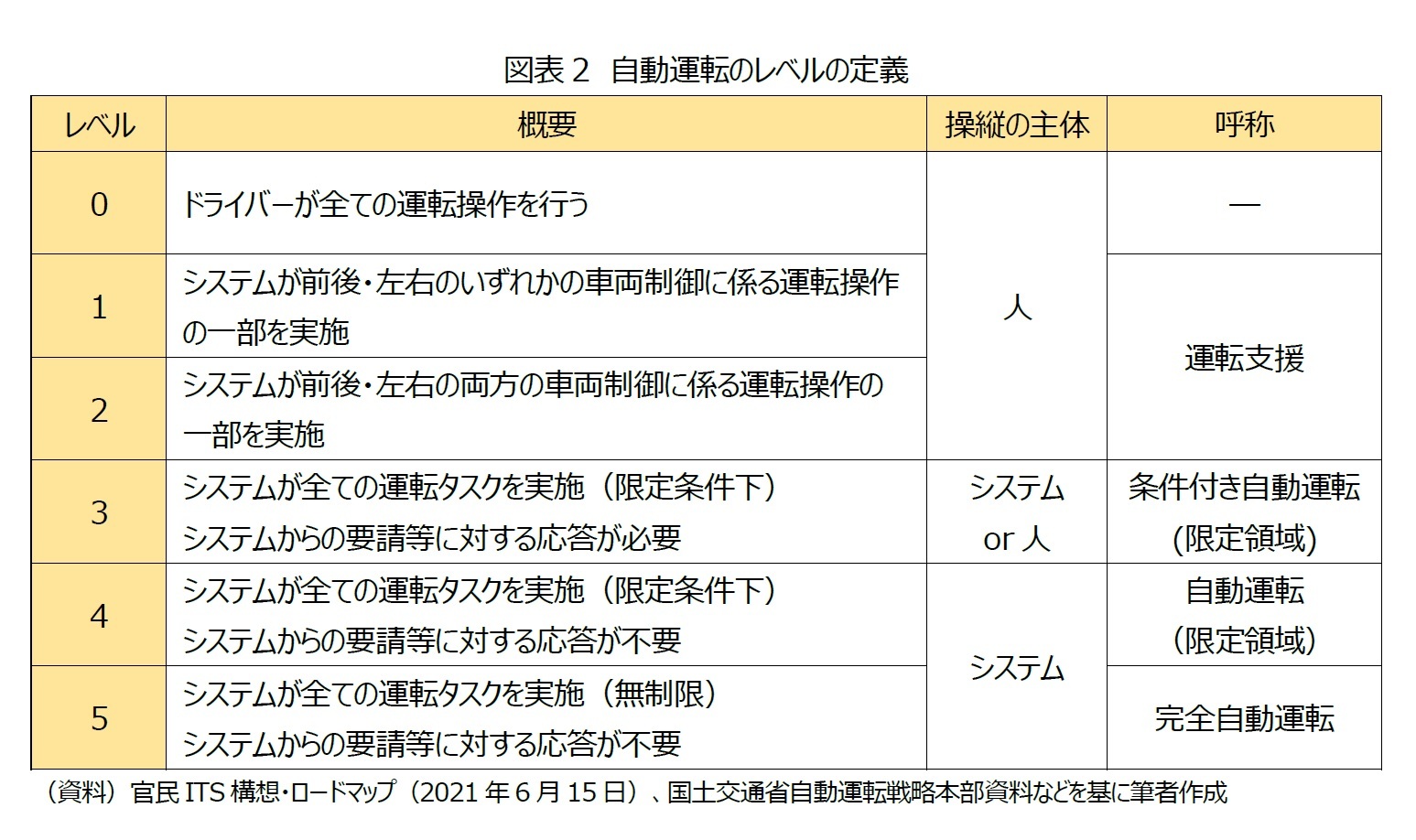
自動運転のレベルは、操縦に人が関与する度合いや、走行エリアが限定されているか・非限定かなどの軸により、5段階に分けられている(図表2)。2020年には、本田技研工業の「レジェンド」が、高速道路の渋滞時に限って自動運転システムを操作主体とできるレベル3の車両として、世界で初めて型式認定され、注目を集めた。しかし、「高速道路の渋滞時」というような、極めて限定的な状況を除けば、公道において、自動運転システムが、他の車両や歩行者等を瞬時に検知し、その動きを予測し、操縦方法を判断し、実際に操作する、という一連の動作を安全に遂行することは、まだまだAI(人工知能)を中心に技術上のハードルが高いと考えられている1。
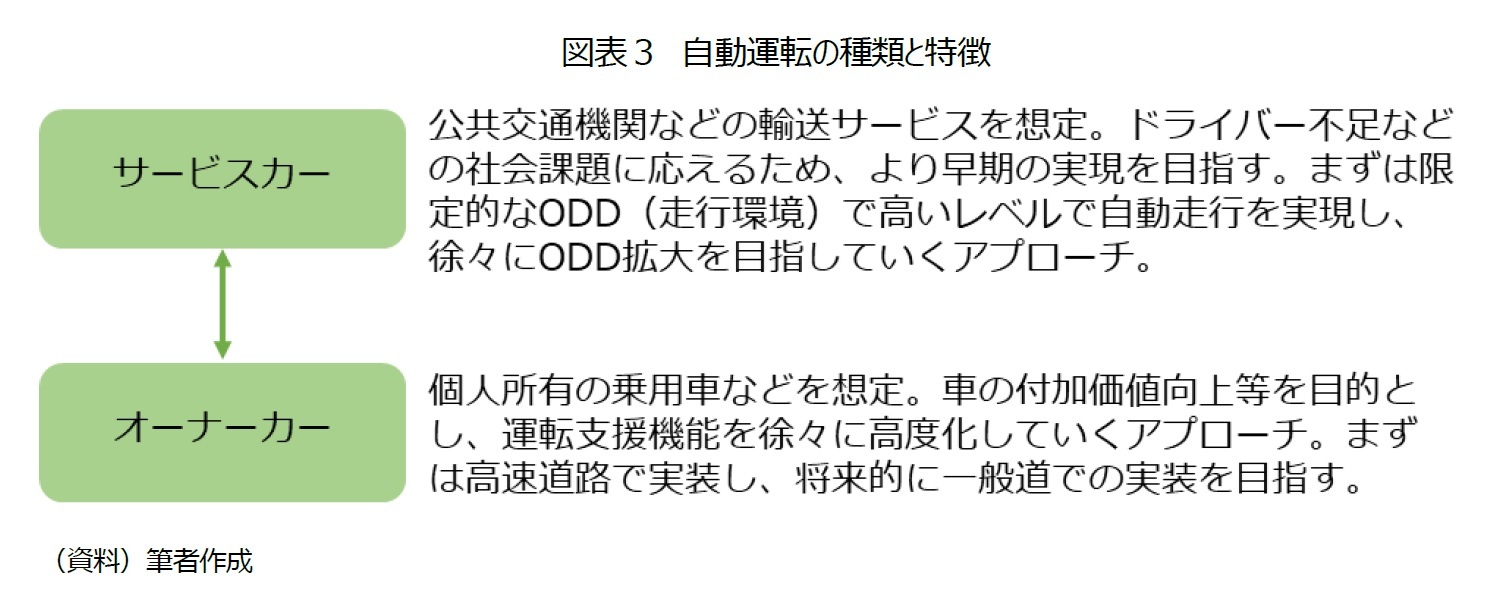
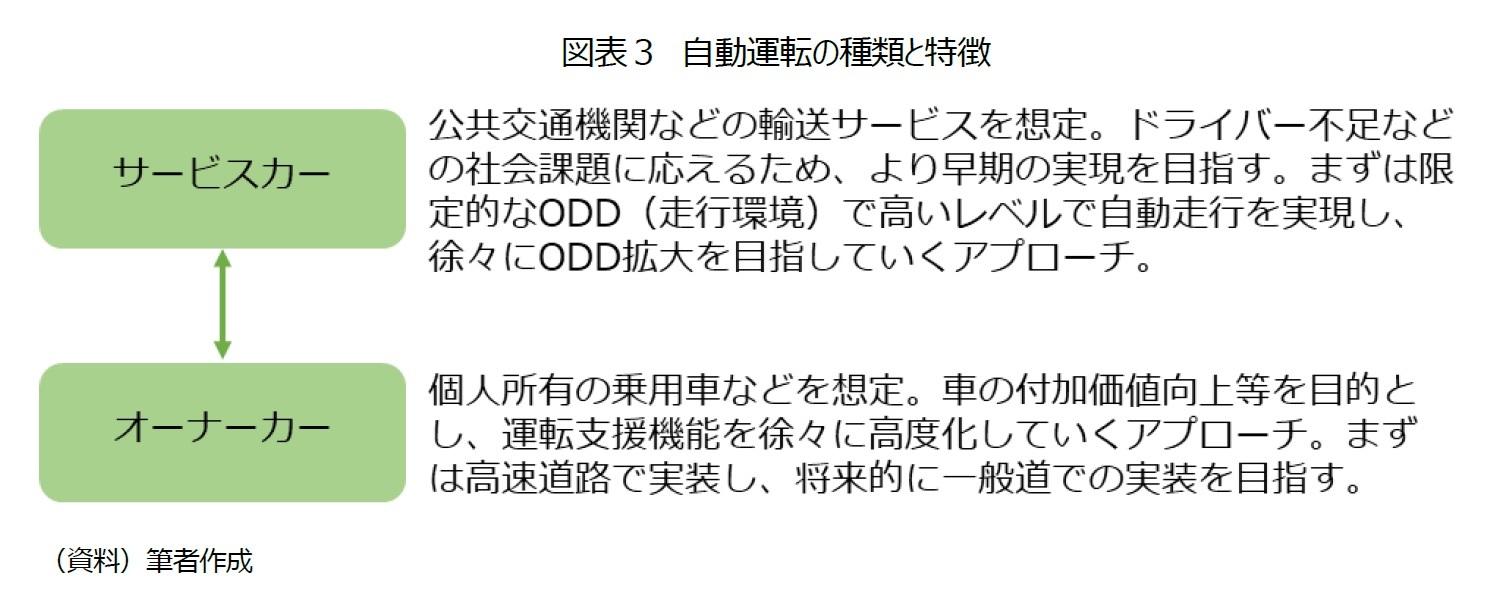
このような技術開発段階において、2019年頃から注目が高まっているのが、バスなどの「サービスカー」に自動運転システムを搭載することである。自動運転の車両は、個人の乗用車などの「オーナーカー」と、公共交通などの「サービスカー」に大別することができるが(図表3)、非限定的な空間で自動走行を目指すオーナーカーに比べて、あらかじめ走行ルートが決まっている路線バスなどは、事前の工夫によって技術的難易度を下げることができると考えられるからである。例えば、走行空間に、歩行者や路上駐車などの障害物の発生を防ぐように地域で対策を講じたり、車両側の装置だけでは検知等が難しい区間においては、道路側にセンサーやカメラ等を設置するなどして、補完することができる。
サービスカーへの自動運転システムの実装において、先駆的な取り組みを行っているのが、群馬大学次世代モビリティ研究センター(CRANTS=Center for Research on Adoption of NextGen Transportation Systems)である。同センターは、次世代の移動手段を社会実装するための研究集団として、2016年12月に設置された。翌年度には、文部科学省の補助金を活用して、前橋市の荒牧キャンパスに開発拠点が整備された。管制・遠隔運転室や、信号や標識を備えた約6,000㎡の専用試験路などが整備され、実験用車両18台を所有した大規模な拠点である。
CRANTSの特徴は、導入する地域ごとに個別の走行計画を作成すること、遠隔地で専門スタッフが車両を監視する「遠隔監視型」であること、道路にセンサーやカメラ等の設備を設置する「インフラ協調型」を採用していることである。これまで民間企業30社以上と共同研究を行い、全国60か所以上で実証実験を重ねてきた。2020年7月には、同センターをスピンアウトしたベンチャー「日本モビリティ株式会社」が設立された。CRANTSと日本モビリティで中心的に研究と実務を行っているのが、同センター副センター長で、同社会長を務める小木津武樹准教授である。
前橋市は、公共交通の乗客減少やドライバー不足の深刻化などから、路線バス再編や郊外部におけるデマンド交通新設など、交通ネットワークの再構築に取り組んでいる。2018年度からは毎年、CRANTSと連携し、市中心部の上毛電鉄中央前橋駅―JR前橋駅の区間で、自動運転システムを導入する実証実験を行っている。
本対談では、前橋市で行われてきた実証実験を題材として、自動運転システムの実用化に向けた課題等について議論し、移動の社会課題解決につなげるための道筋について検討する。
サービスカーへの自動運転システムの実装において、先駆的な取り組みを行っているのが、群馬大学次世代モビリティ研究センター(CRANTS=Center for Research on Adoption of NextGen Transportation Systems)である。同センターは、次世代の移動手段を社会実装するための研究集団として、2016年12月に設置された。翌年度には、文部科学省の補助金を活用して、前橋市の荒牧キャンパスに開発拠点が整備された。管制・遠隔運転室や、信号や標識を備えた約6,000㎡の専用試験路などが整備され、実験用車両18台を所有した大規模な拠点である。
CRANTSの特徴は、導入する地域ごとに個別の走行計画を作成すること、遠隔地で専門スタッフが車両を監視する「遠隔監視型」であること、道路にセンサーやカメラ等の設備を設置する「インフラ協調型」を採用していることである。これまで民間企業30社以上と共同研究を行い、全国60か所以上で実証実験を重ねてきた。2020年7月には、同センターをスピンアウトしたベンチャー「日本モビリティ株式会社」が設立された。CRANTSと日本モビリティで中心的に研究と実務を行っているのが、同センター副センター長で、同社会長を務める小木津武樹准教授である。
前橋市は、公共交通の乗客減少やドライバー不足の深刻化などから、路線バス再編や郊外部におけるデマンド交通新設など、交通ネットワークの再構築に取り組んでいる。2018年度からは毎年、CRANTSと連携し、市中心部の上毛電鉄中央前橋駅―JR前橋駅の区間で、自動運転システムを導入する実証実験を行っている。
本対談では、前橋市で行われてきた実証実験を題材として、自動運転システムの実用化に向けた課題等について議論し、移動の社会課題解決につなげるための道筋について検討する。
1 AI技術から見た自動運転の技術的課題に関わる考察については、百嶋徹「自動運転とAI のフレーム問題」ニッセイ基礎研究所『基礎研レポート』2019 年11 月18 日を参照されたい。
<対談参加者>
◇小木津武樹氏 慶応義塾大学大学院政策・メディア研究科後期博士課程修了。博士(学術)。群馬大学大学院理工学府准教授、同大学次世代モビリティ社会実装研究センター副センター長。株式会社日本モビリティ取締役会長。自動運転の実証実験や実車デモの経験が多数ある。
◇細谷精一氏 前橋市未来創造部参事兼交通政策課長。1987年採用。群馬県企画部交通政策課(出向)や市企画部企画調整課などを経て現職。上毛電鉄への上下分離方式やコミュニティバスの導入、JR前橋駅前広場整備、地域公共交通計画、自動運転バスの企画・導入など、市の交通政策全般を統括する。
◇百嶋徹 ニッセイ基礎研究所社会研究部上席研究員。専門は企業経営を中心に産業競争力、イノベーション、AI・IoT、スマートシティ、企業不動産・オフィス戦略、CSR・ESG経営等。AI・IoTの利活用分野としての自動運転にも強い関心を持つ。
◇坊美生子(モデレーター) ニッセイ基礎研究所生活研究部准主任研究員。ジェロントロジー推進室兼任。高齢者の視点で移動支援、交通政策を研究。
自動運転システムの導入に適した道路環境(ODD)や気象などの条件は何か。
坊准主任研究員 (以下、坊): 企業や研究機関が自動運転の研究開発と実装に取り組む目的や、実現を目指す時期は様々だと思いますが、地域公共交通の衰退やドライバーの人手不足、高齢ドライバーによる交通事故増加といった問題は、既に危機的な状況にあります。行政がお金を出して、これらの社会課題解決を目的として導入するためには、より短いスパンで実用化が可能なシステムを構築することが求められていると思います。
そのような中で、CRANTSさんが実施している、インフラ協調型、かつ遠隔監視による自動運転システムというものは、安全確保やコスト縮減の面で大変有意性があり、自動運転の実用化への近道になるのではないかと期待しているところです。
そうは言っても、導入する環境や状況によっては、自動運転システムによる走行がしやすいところと、非常に難しいところがある。自動運転を実際に実現していくためには、導入する初期段階で、走行に適している区間を選ぶことが非常に重要ではないでしょうか。
小木津先生は、昨年、群馬大学発のベンチャー「日本モビリティ」を設立され、これまで全国60を超える地域で実証実験を実施されてきました。その結果として、実証実験から実装へと円滑にサイクルを回していくためには、最初の計画がとても大事だとおっしゃっていて、日本モビリティではコンサルティングも行っていらっしゃいます。まずは、自動走行に適した条件や、「こんな状況では走行が難しい」という点からクリアにしていきたい、というのが本日の対談のスタートです。
最初に、自動運転の走行に適した道路環境などの条件、いわゆるODD(Operational Design Domain)についてです。
今のところ、CRANTSさんの自動運転車両は時速20kmで走行しているので、例えば片側一車線だと後続車両による追い越しができず、渋滞が発生するので、導入は難しいのではないでしょうか。また、歩車分離されていない生活道路ではもっと難しい。例えば私の自宅の近所の生活道路を思い浮かべても、小さな子どもが多く、飛び出しのリスクがある。コロナ禍になって宅配も増えているので、配送のトラックの駐車も多く、自転車がかなりのスピードで走行していることもある。たまに猫も横切る。このように、生活道路にはいろんな障害物があり、自動運転の安全確保が難しい。もし導入したら、衝突を回避しようとして、しょっちゅう車両が止まってしまうのではないでしょうか。
次に、交通空白地や交通不便地域に導入できるか、という点も重要だと思います。交通空白地では、新しい交通手段の導入に対する住民の皆さんの期待値は高いと思いますが、例えばバスのフィーダー路線が走っているような山間部では、通信環境が悪くなるので、GPSを使った車両の自己位置推定などが難しくなるのではないでしょうか。また、CRANTSさんのようなインフラ協調型のシステムは、道路側にカメラや磁気マーカーを設置したり、専用のシステム協調信号機を設置したりと、インフラへの投資が必要になるので、一定の乗客数が見込めるところでないと厳しいと考えるのか。
さらに、導入後、その日に実際、走れるかどうかという気象条件もあります。豪雨や積雪はどのぐらいまで大丈夫なのでしょうか。周囲の人やモノを検知するセンシングが、積雪では難しいとなれば、寒冷地への自動運転の導入は厳しい、ということになるのでしょうか。
そのような中で、CRANTSさんが実施している、インフラ協調型、かつ遠隔監視による自動運転システムというものは、安全確保やコスト縮減の面で大変有意性があり、自動運転の実用化への近道になるのではないかと期待しているところです。
そうは言っても、導入する環境や状況によっては、自動運転システムによる走行がしやすいところと、非常に難しいところがある。自動運転を実際に実現していくためには、導入する初期段階で、走行に適している区間を選ぶことが非常に重要ではないでしょうか。
小木津先生は、昨年、群馬大学発のベンチャー「日本モビリティ」を設立され、これまで全国60を超える地域で実証実験を実施されてきました。その結果として、実証実験から実装へと円滑にサイクルを回していくためには、最初の計画がとても大事だとおっしゃっていて、日本モビリティではコンサルティングも行っていらっしゃいます。まずは、自動走行に適した条件や、「こんな状況では走行が難しい」という点からクリアにしていきたい、というのが本日の対談のスタートです。
最初に、自動運転の走行に適した道路環境などの条件、いわゆるODD(Operational Design Domain)についてです。
今のところ、CRANTSさんの自動運転車両は時速20kmで走行しているので、例えば片側一車線だと後続車両による追い越しができず、渋滞が発生するので、導入は難しいのではないでしょうか。また、歩車分離されていない生活道路ではもっと難しい。例えば私の自宅の近所の生活道路を思い浮かべても、小さな子どもが多く、飛び出しのリスクがある。コロナ禍になって宅配も増えているので、配送のトラックの駐車も多く、自転車がかなりのスピードで走行していることもある。たまに猫も横切る。このように、生活道路にはいろんな障害物があり、自動運転の安全確保が難しい。もし導入したら、衝突を回避しようとして、しょっちゅう車両が止まってしまうのではないでしょうか。
次に、交通空白地や交通不便地域に導入できるか、という点も重要だと思います。交通空白地では、新しい交通手段の導入に対する住民の皆さんの期待値は高いと思いますが、例えばバスのフィーダー路線が走っているような山間部では、通信環境が悪くなるので、GPSを使った車両の自己位置推定などが難しくなるのではないでしょうか。また、CRANTSさんのようなインフラ協調型のシステムは、道路側にカメラや磁気マーカーを設置したり、専用のシステム協調信号機を設置したりと、インフラへの投資が必要になるので、一定の乗客数が見込めるところでないと厳しいと考えるのか。
さらに、導入後、その日に実際、走れるかどうかという気象条件もあります。豪雨や積雪はどのぐらいまで大丈夫なのでしょうか。周囲の人やモノを検知するセンシングが、積雪では難しいとなれば、寒冷地への自動運転の導入は厳しい、ということになるのでしょうか。
 小木津武樹・群馬大学次世代モビリティ社会実装研究センター副センター長(以下、小木津氏): まずODDの考え方についてですが、そもそも私自身は、果たして条件を一般化させるのが正しいのかな、と思っています。例えば生活道路の中でも、場所によっては歩車分離しているところも、していないところもあります。幹線道路もその逆で、実は歩車分離が十分ではないところもある、というのが日本の現状ではないでしょうか。全国の道路環境を調べても、同じようなモデルにはなってないんですよね。なので、そういう意味で、われわれも自動運転に適したODDを一般化しづらい、と正直感じています。
小木津武樹・群馬大学次世代モビリティ社会実装研究センター副センター長(以下、小木津氏): まずODDの考え方についてですが、そもそも私自身は、果たして条件を一般化させるのが正しいのかな、と思っています。例えば生活道路の中でも、場所によっては歩車分離しているところも、していないところもあります。幹線道路もその逆で、実は歩車分離が十分ではないところもある、というのが日本の現状ではないでしょうか。全国の道路環境を調べても、同じようなモデルにはなってないんですよね。なので、そういう意味で、われわれも自動運転に適したODDを一般化しづらい、と正直感じています。したがって日本モビリティも、ご相談があった場合には現地を専門スタッフが視察し、どこが自動運転で走りやすいか、個々の場所をきちんと見ながら計画を立てていくことを重視しています。
ただ、導入する上で重要なエッセンスというものはあります。1点目が「歩車分離」です。自動運転が他の様々な交通と交わるところでは、様々なリスクが伴うので、これらがいかに整えられていくかが大事なことです。
他の交通との関係でもう一つ大事になるのが、技術的な部分です。我々はGPSやレーザーセンサーなどを使っていますが、こういったセンサーが所望の機能を得やすい場所と、得にくい場所があります。これが2点目です。
3点目は、地域の方々の受け入れ、受容性が高いかどうかです。以上の三つが非常に大事な要素だと考えています。それらが複合して自動運転の難易度が決まってくると思います。それぞれの地域で、それぞれの特徴が入り混じって環境ができあがっているので、それをきちんと自動運転の視点で整理して分解してあげることで、ODDが決まってくるのです。
次に、降雪の話です。自動運転は降雪には正直、弱いです。特に降っているときが、いちばん弱い。もちろん、ブラックアイスバーンみたいに、手動で走れないときは自動運転も走れないので、それはもちろんのこと、降雪しているとき、あるいはゲリラ豪雨といったような状況で自動運転を運用していくのは、センサーが機能するか等の課題があるため、走り切れないかなと思っています。
他方、よく言われるのは、そういったところは運用でカバーするという話です。私が目指しているのは、自家用車ではなく、サービスカーへの実装なので、運行管理している方が、きちんと気象条件等も把握された上で、その日に自動運転を動かすのが適切なのか、あるいは、あらかじめドライバーさんを手配しておくのが良いのかを判断する。そういう運用面のノウハウもきちんと蓄えて、自動運転を運用していく形になると思います。
もちろん技術も並行して高度化していくので、もしかしたら降雪やゲリラ豪雨でも対応できるセンサーも将来、できあがっていくかもしれませんが、それはそれで推移を見ていきつつ、運用の部分でも並行して進めていくというのが現実的ではないかと思っています。
坊:「運用でカバーする」という考え方には、大変納得しました。飛行機も、雪で視界が悪い時は運行を取りやめるし、鉄道でも、私は昔、香川県の高松市に住んでいたのですが、瀬戸大橋を走っているJR四国の快速マリンライナーも、強風になると運休していました。旅客輸送は乗客の人命に関わるので、その日の条件によって、事業者が走れるかどうかを判断するというのは当然のことで、自動運転になってもそこは同じだと思います。
(2021年11月09日「ジェロントロジーレポート」)
このレポートの関連カテゴリ

 各種レポート配信をメールでお知らせ。読み逃しを防ぎます!
各種レポート配信をメールでお知らせ。読み逃しを防ぎます!



新着記事
-
2025年11月04日
今週のレポート・コラムまとめ【10/28-10/31発行分】 -
2025年10月31日
交流を広げるだけでは届かない-関係人口・二地域居住に求められる「心の安全・安心」と今後の道筋 -
2025年10月31日
ECB政策理事会-3会合連続となる全会一致の据え置き決定 -
2025年10月31日
2025年7-9月期の実質GDP~前期比▲0.7%(年率▲2.7%)を予測~ -
2025年10月31日
保険型投資商品の特徴を理解すること(欧州)-欧州保険協会の解説文書
お知らせ
-
2025年07月01日
News Release
-
2025年06月06日
News Release
-
2025年04月02日
News Release
【自動運転は地域課題を解決するか(上)~群馬大学のオープンイノベーションの現場から】【シンクタンク】ニッセイ基礎研究所は、保険・年金・社会保障、経済・金融・不動産、暮らし・高齢社会、経営・ビジネスなどの各専門領域の研究員を抱え、様々な情報提供を行っています。
自動運転は地域課題を解決するか(上)~群馬大学のオープンイノベーションの現場からのレポート Topへ- 新型コロナウイルス
- ウィズコロナ・アフターコロナ
- 生成AI・AI
- IoT
- デジタルトランスフォーメーション(DX)
- フィンテック(FinTech)
- キャッシュレス
- デジタル通貨
- デジタルプラットフォーム
- マイナンバー
- MaaS、CASE
- SDGs
- ESG
- 気候変動
- カーボンニュートラル・脱炭素社会
- サステナビリティ
- ウェルビーイング
- 生物多様性
- イデコ(iDeCo)
- 新NISA・NISA
- 日本銀行
- 人手不足・人材不足
- 働き方改革
- 人的資本経営
- 従業員エンゲージメント
- テレワーク・在宅勤務
- ダイバーシティ(多様性)社会
- 外国人雇用・就労
- 労働政策
- 地域包括ケア・地域共生社会
- 認知症
- 金融(ファイナンシャル)ジェロントロジー
- 全世代型社会保障
- 社会保障・税改革
- 医療・介護制度改革
- 健康寿命
- 健康経営
- 格差・貧困
- 世代間格差
- パワーカップル
- 未婚化
- プレコンセプションケア
- 少子高齢化
- 東京一極集中
- インバウンド
- シェアリングエコノミー
- Z世代・α世代
- エンタメ
- オフィスレントインデックス
- 生命保険事業概況
- 米中貿易摩擦
- 米国
- 中国
- 欧州
- アジア・新興国
- 韓国
- ASEAN
- 統計
- 確定拠出年金
- 企業型DC
- 資産所得倍増プラン
- 金融リテラシー
- 住宅リテラシー
- 年金制度改革
- インド
- 経済安全保障
- 供給網(サプライ・チェーン)
- 消費者物価指数(CPI)│日本
- 雇用統計│日本
- 鉱工業生産指数│日本
- 貿易統計│日本
- 法人企業統計│日本
- QE速報・予測
- 日銀金融政策決定会合
- 日銀短観│日本
- 資金循環統計│日本
- 景気ウォッチャー調査│日本
- 地域経済報告(さくらレポート)
- マネタリーベース│日本
- GDP等│米国
- FOMC(連邦公開市場委員会)│米国
- 住宅販売・着工│米国
- 雇用統計│米国
- 米個人所得・支出|米国
- ECB政策理事会│欧州
- ユーロ圏消費者物価指数
- ユーロ圏GDP
- ユーロ圏失業率
- 英国雇用関連統計
- 英国金融政策
- 英国GDP
- 将来人口推計
- 人口動態統計
- 宿泊旅行統計
- 中国GDP
- インドGDP
- タイGDP
- マレーシアGDP
- フィリピンGDP
- インドネシアGDP
- ベトナムGDP
- ロシアGDP
- ブラジルGDP
- IMF世界経済見通し
- 企業物価指数
- インド消費者物価
研究領域
Copyright © NLI Research Institute. All rights reserved.